用于运动功能康复的可穿戴软体手系统及控制
项目类型: 国家自然科学基金(国际合作与交流项目) 项目负责人: 夏泽洋
执行期: 2018-2021 经费总额: 20万元
研究背景
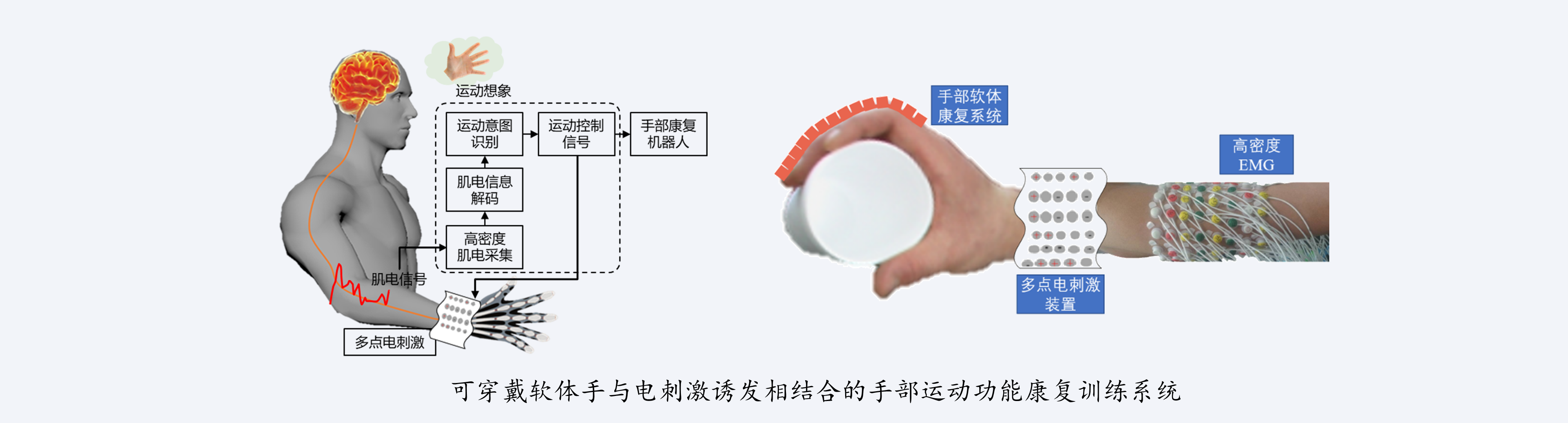
脑卒中后运动中枢受损将引起侧肢体运动功能障碍。在侧肢体运动功能中,手部的运动功能是实现人类基本生活和劳动力的基础,因而手部运动功能康复对于患者恢复生活自理能力乃至劳动能力至关重要。现有手部康复训练系统在结构设计和康复训练模式上存在诸多缺点,难以满足临床运动功能障碍患者的手部康复训练需求。针对上述问题,本项目开展了用于运动功能康复的新型可穿戴软体手系统及其控制方法研究,并进行了深入的国际合作与交流。项目完成了一种新型可穿戴软体手系统,通过肌电信号主动控制及患者手臂附加功能电刺激,实现可穿戴软体主动控制与电刺激诱发运动相结合的手部运动功能,最终实现高效、安全、轻巧便携的手部运动功能康复训练系统。
研究方法
用于手部运动功能康复的纤维强化型并联腔道式软体驱动器
- 手部运动分析及功能康复需求
- 驱动器布置方案及结构设计
- 新型软体驱动器制备方法

多通道运动意图检测及软体手与操作对象的交互控制
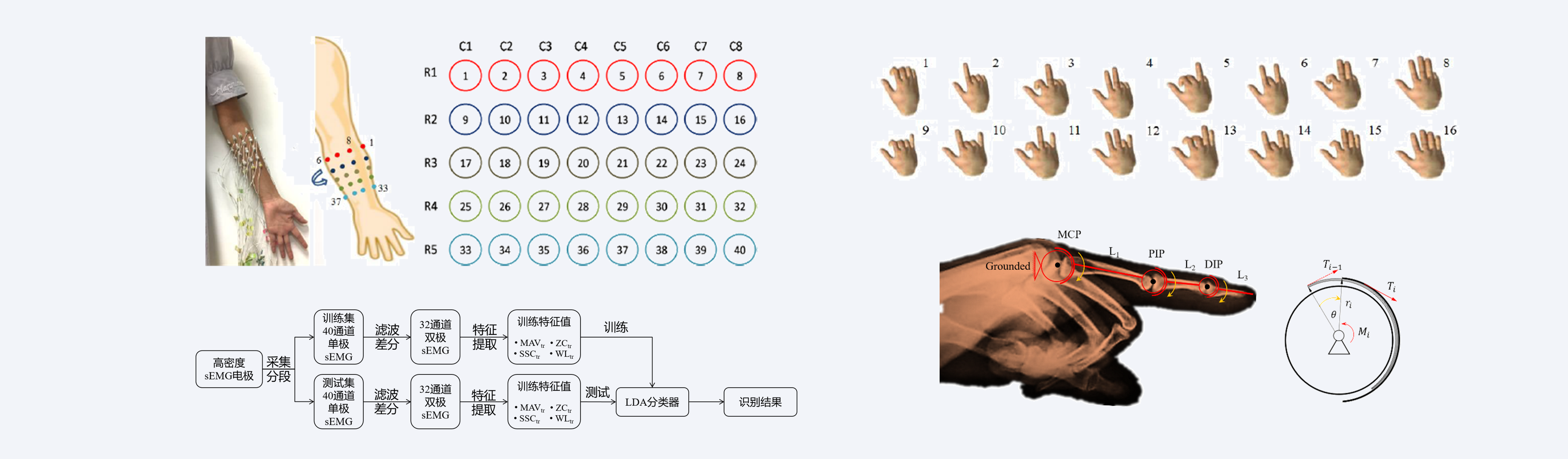
- 基于高密度表面肌电信号的手部运动意图识别
- 软体手与操作对象的交互控制
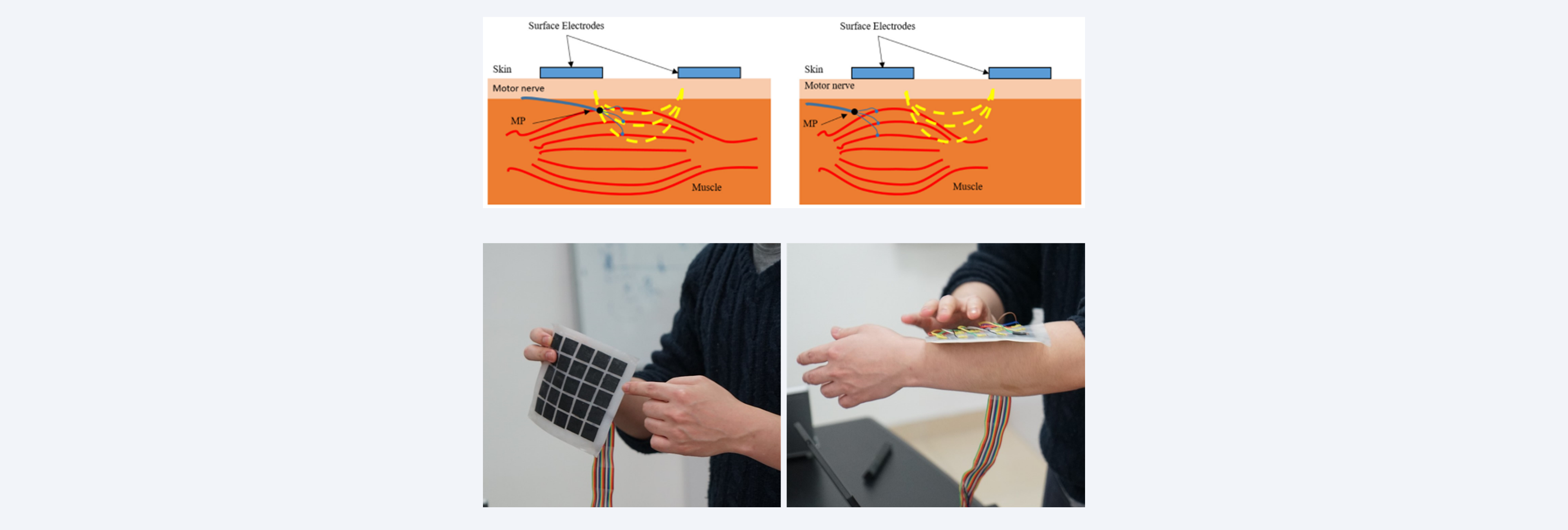
多点功能性电刺激诱发运动及与软体手主动运动的协同控制
- 多点功能性电刺激装置
- 可穿戴软体手的机械运动与电刺激诱发运动相结合的协同控制
手部运动功能及抓取操作实验与手部抓握运动功能评价
- 手部运动功能及抓取操作实验
- 手部抓握运动功能评价

(项目合作团队:日本国立大学法人 电气通信大学Hiroshi Yokoi教授团队,中国科学院深圳先进技术研究院李光林研究员团队)