新闻简讯

[202504] 研究论文Automatic Orthodontic Treatment Planning Using Deep Learning将发表于Machine Intelligence Research
本论文针对智能口腔诊疗领域中的自动化口腔正畸治疗规划问题,提出了包含预处理、治疗规划与后处理三大功能模块的自动化口腔正畸治疗规划方法,在预处理模块中对口腔组织进行自动分割和重构,在治疗规划模块中采用Deep Align Net网络进行自动化排牙,在后处理模块中生成分阶段的治疗方案。本方法实现了治疗前智能预处理、治疗中智能预测优化以及治疗实施的智能辅助三大智能化,为自动化口腔正畸治疗规划提供了新的解决方案。本论文研究受国家自然科学基金联合基金重点项目(U2013205)等基金支持,将发表于Machine Intelligence Research(中科院2区/JCR Q1期刊,IF=6.4)。
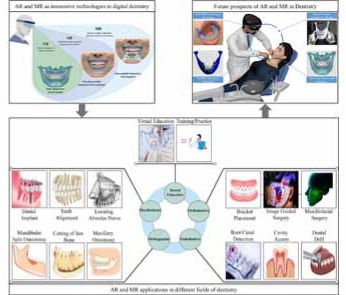
[202502] 综述论文AR and MR in Dentistry: Developments, Applications, and Prospects发表于IEEE Transactions on Medical Robotics and Bionics
本文系统综述了增强现实(AR)与混合现实(MR)技术在牙科领域的最新进展与应用前景。聚焦于AR/MR在数字化牙科手术导航、实时可视化及教育培训中的创新突破,在正畸、牙髓病治疗、种植牙、颌面外科等多领域均有应用。但目前这项技术存在成本效益不明、精度波动等问题。未来可从优化 OST - HMD 技术、发展反馈导航技术等方面改进。随着技术进步,AR 和 MR 有望在牙科广泛应用,提高医疗质量和效率。
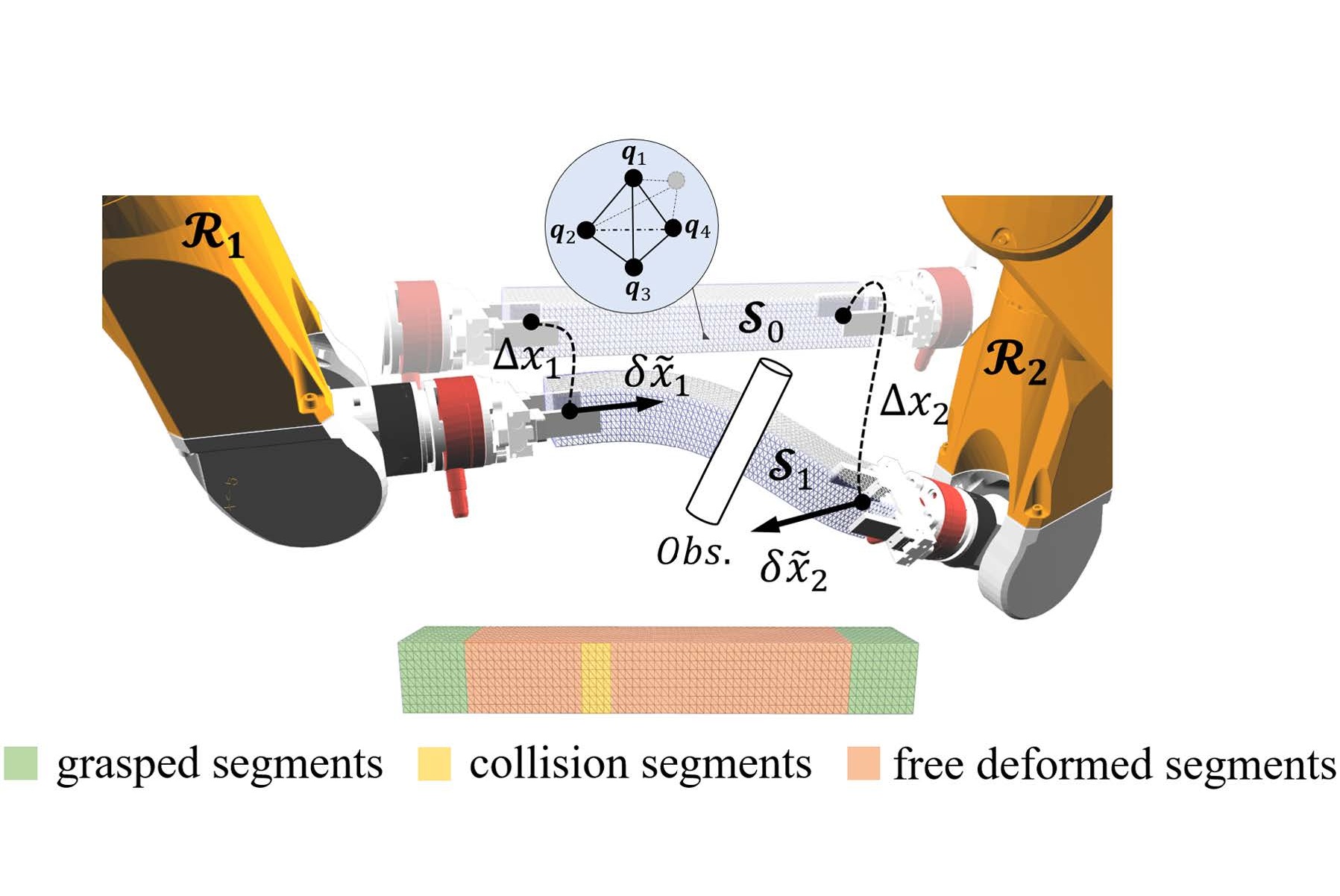
[202412] 论文A Robot-Object Unified Modeling Method for Deformable Object Manipulation in Constrained Environments发表于IEEE/ASME Transactions on Mechatronics
本文提出了一种在受限环境中实现可变形对象操作规划的统一建模方法,将运动操作、对象形态和环境约束集成到一个物理变形模型中,实现高效准确的“机器人-对象”联合建模及形变状态计算。通过利用基于乘数的并行数值配方的交替方向法和基于学习的 sim2real 参数估计策略,实现了卓越的计算效率和建模精度。
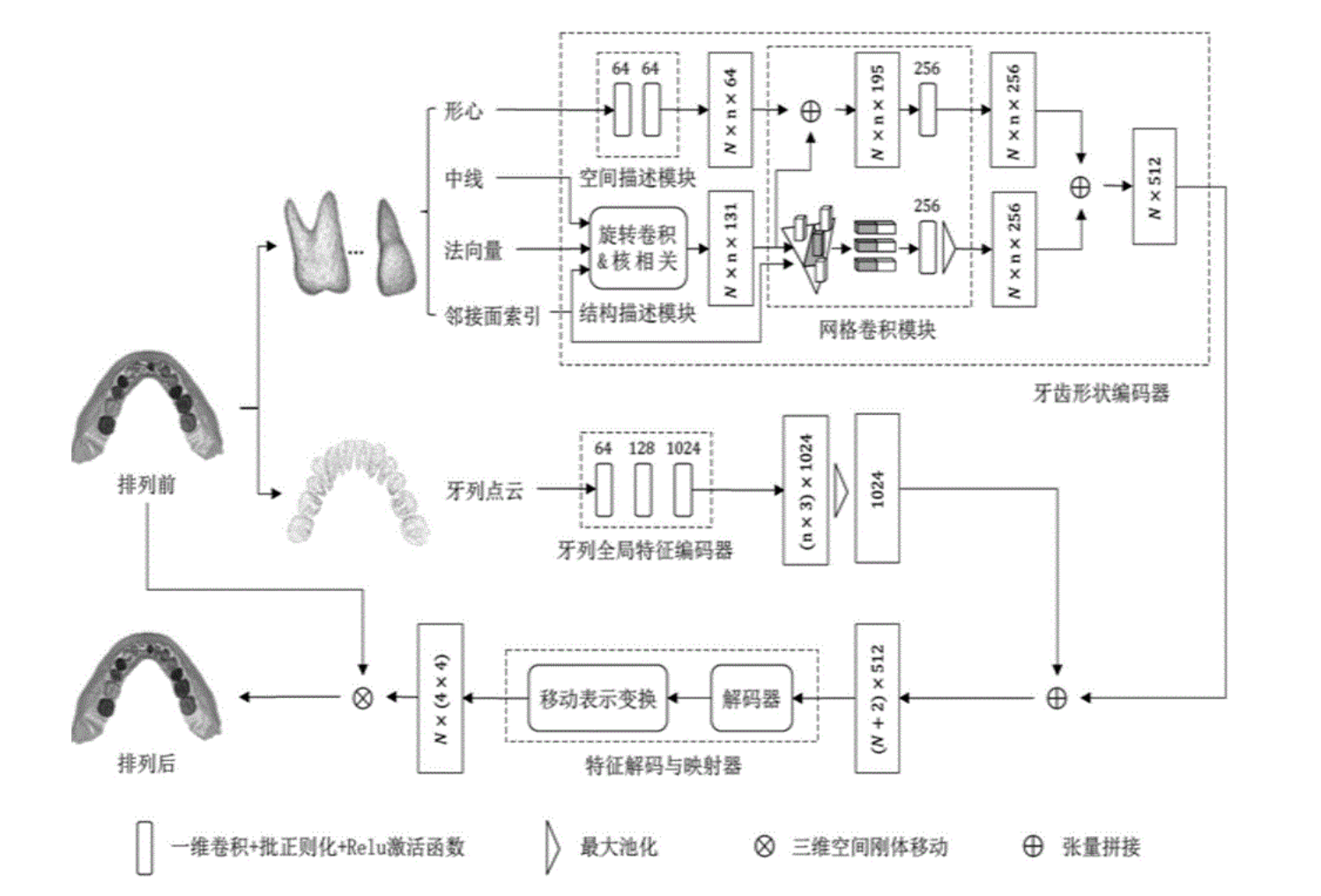
[202412] "基于网格特征深度学习的口腔正畸自动排牙方法和系统"获发明专利授权
本发明公开了一种基于网格特征深度学习的口腔正畸自动排牙方法和系统。该方法包括:获取用于排牙的牙齿三角网格三维模型;将所述牙齿三角网格模型输入到预训练的深度学习模型,获得排牙结果的牙齿预测位置。其中所述深度学习模型包括第一特征编码器、第二特征编码器以及特征解码与映射器,第一特征编码器以所述牙齿三角网格三维模型作为输入,获得牙齿形状特征,第二特征编码器以牙列点云作为输入,获得牙列全局特征,所述特征解码与映射器基于所述牙齿形状特征和所述牙列全局特征,获得预测的排牙结果。本发明能自动、准确地规划患者牙齿的理想位姿。
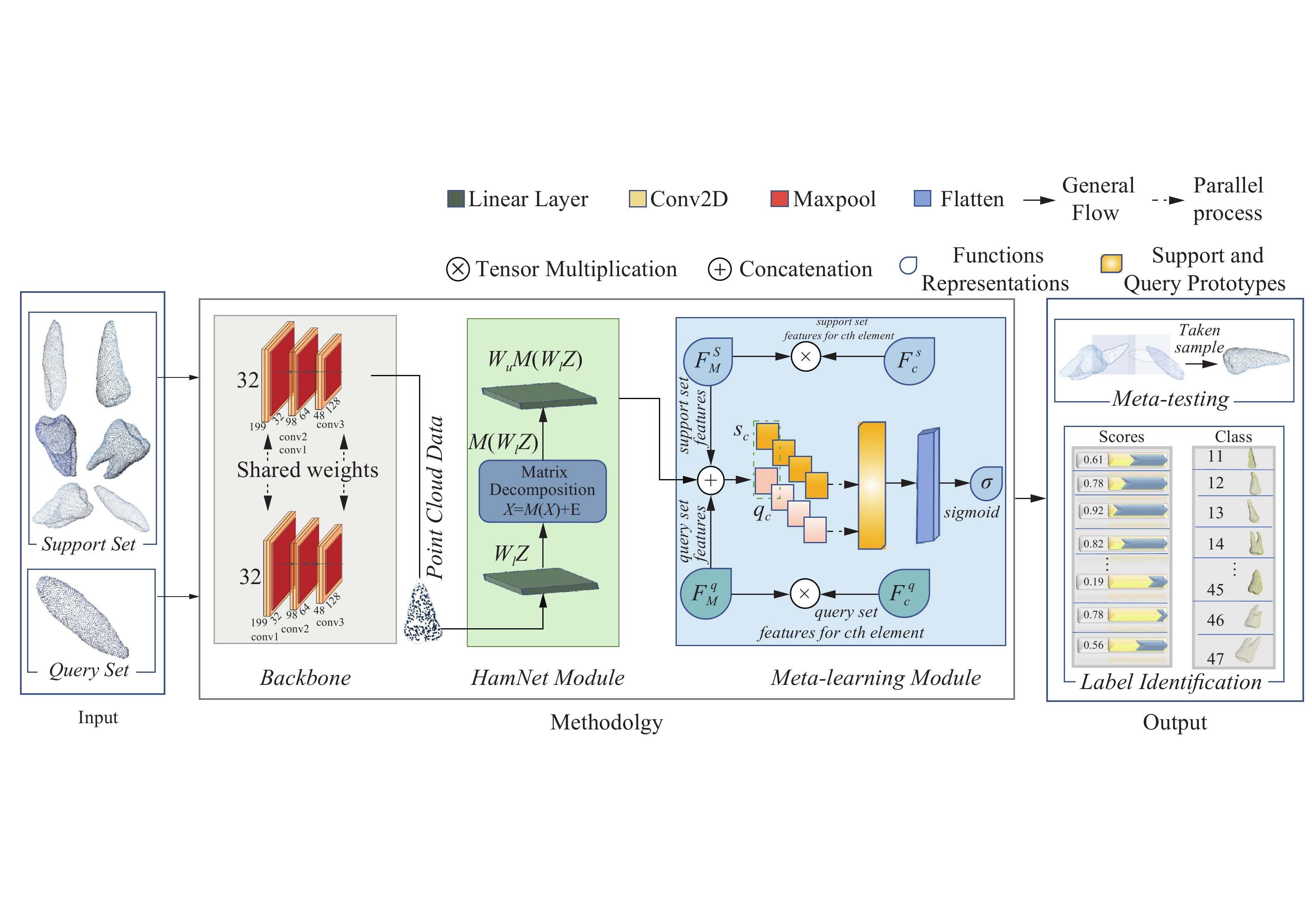
[202412] 论文Automatic Tooth labeling After Segmentation using Prototype-based Meta-learning在线发表于Machine Intelligence Research
本文提出了一种基于完整牙齿模型的牙齿标记方法,通过基于元学习方法的小样本分类,实现了对完整牙齿模型的自动标记。为了解决类内相似性问题,本文还设计了一种基于矩阵分解的注意力机制。相对于其他前沿方法,本方法显著提高了标记准确度且特别适用于对相似牙齿、缺牙的自动标记,在数字牙科中有很大的优势和可行性。

[202412] 论文A Material Point Based Simulation Method for Soft Robots with Free Boundary Interactions发表于Robotica
本文提出了一种基于物质点法的仿真方法,用于在自由边界条件下的软体机器人仿真,特别适用于软体机器人与流体的相互作用和非线性变形。软体机器人在实际应用中,通常会存在复杂的边界交互同时产生较大变形,而物质点法作为一种无网格方法,在处理大变形问题和复杂交互问题上具有天然的优势。本文引入了隐式时间积分和自动微分方法,在保证了精度的同时,提高了物质点法仿真的稳定性,解决了软体机器人在自由边界相互作用和不确定接触条件下的变形预测问题。
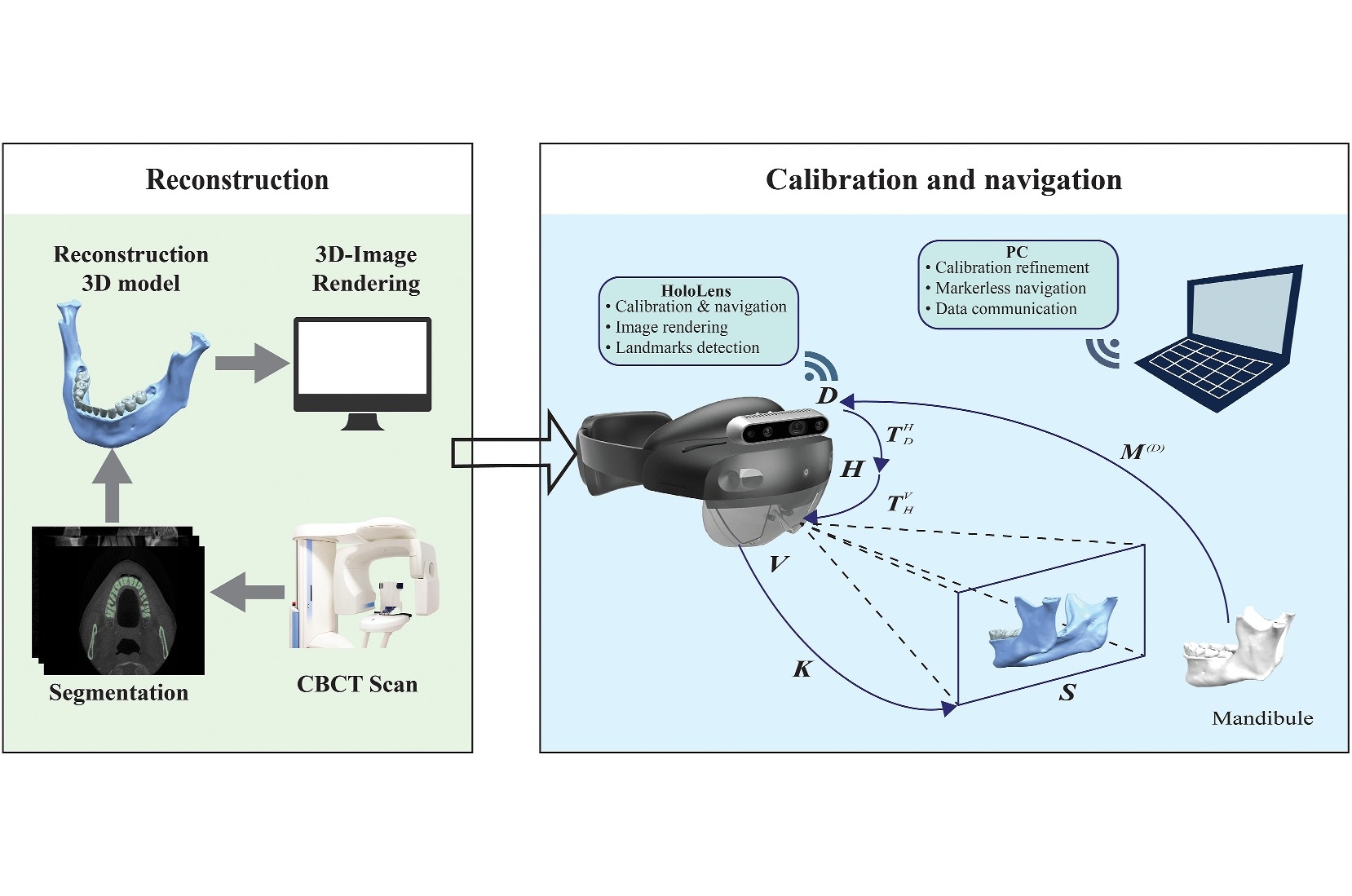
[202412] 论文Automatic feature-based markerless calibration and navigation method for augmented reality assisted dental treatment发表于IET Cyber‐Systems and Robotics
本文提出了一种新型基于特征点的无标记标定与导航方法,适用于HMD-AR可视化系统。研究团队重点攻克了三个关键技术难题:首先,通过生成合成RGB-D数据用于解剖标志点检测,并训练深度卷积神经网络(DCNN);其次,利用检测到的解剖标志点实现HMD自动标定,无需用户干预或光学追踪器;最后,开发了多迭代最近点(ICP)算法以实现高效的3D-3D实时导航。

[202411] 团队赴清华大学参加2024年软体机器人大会,受邀作《Morphological Design Methodologies of Soft Robots》报告
夏泽洋教授团队赴清华大学参加2024年软体机器人大会,夏泽洋教授受邀作《Morphological Design Methodologies of Soft Robots》报告。报告概述了形态设计方法的概念、发展及三大类:正向仿生法、过渡拓扑优化法、基于学习的方法及逆向形态计算法。此外,还重点介绍了团队在软体机器人拓扑优化领域的研究成果。(该工作为软体机器人形态-功能一体化设计提供了系统方法论。)
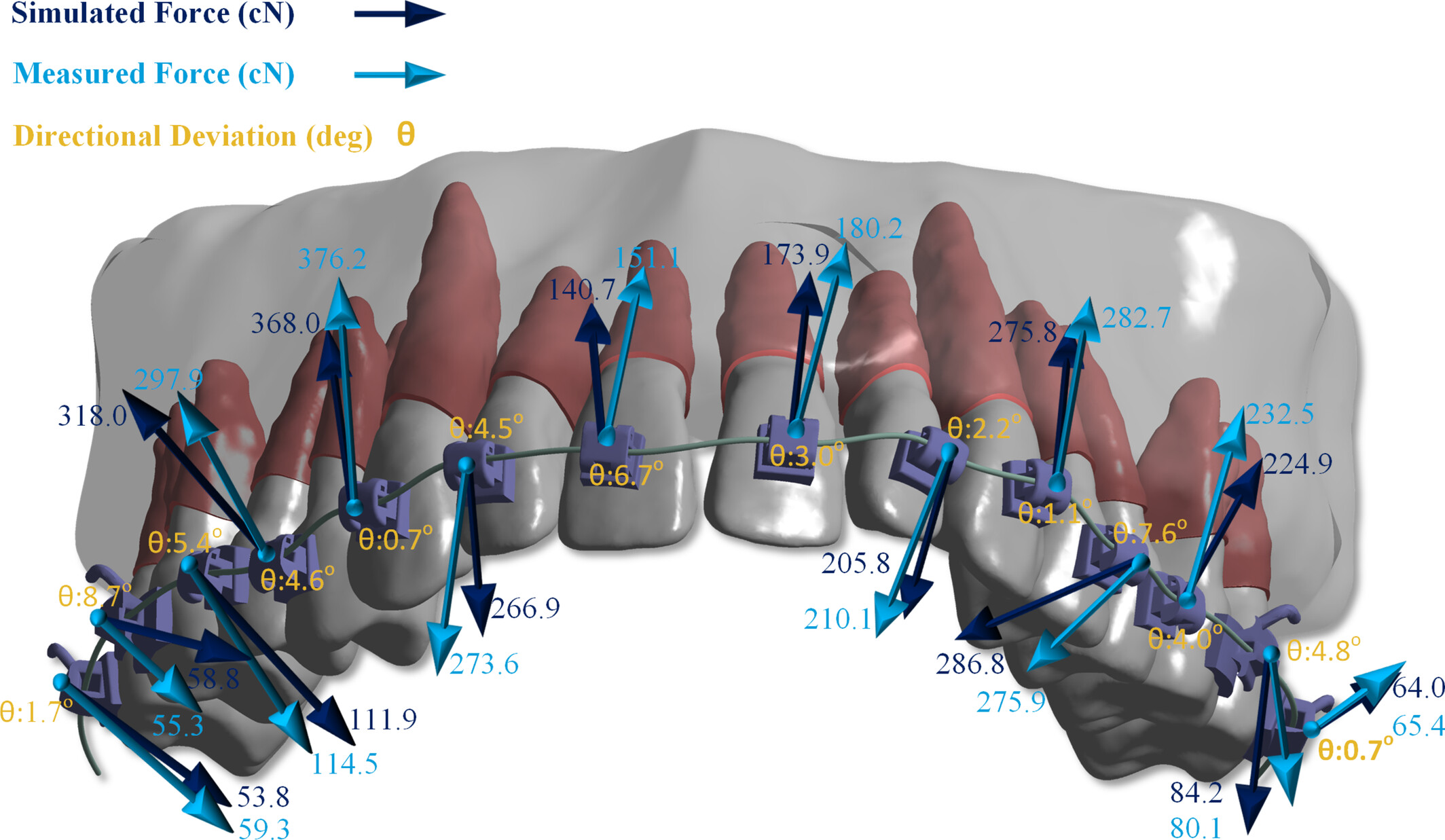
[202411] 论文Precision Orthodontic Force Simulation Using Nodal Displacement-Based Archwire Loading Approach发表于International Journal for Numerical Methods in Biomedical Engineering
本文提出了一种基于节点位移的有限元分析方法,用于精准模拟正畸弓丝加载下的力学响应。通过构建患者个性化的牙齿-牙周膜-骨复合体三维模型,结合托槽与弓丝模型,采用两步式有限元技术:首先通过节点位移实现弓丝与托槽的精确对位,随后计算牙齿位移并推导正畸力及力矩。该方法能显著提高正畸力预测的准确性,优化治疗计划,为临床定制化矫治方案提供可靠依据。
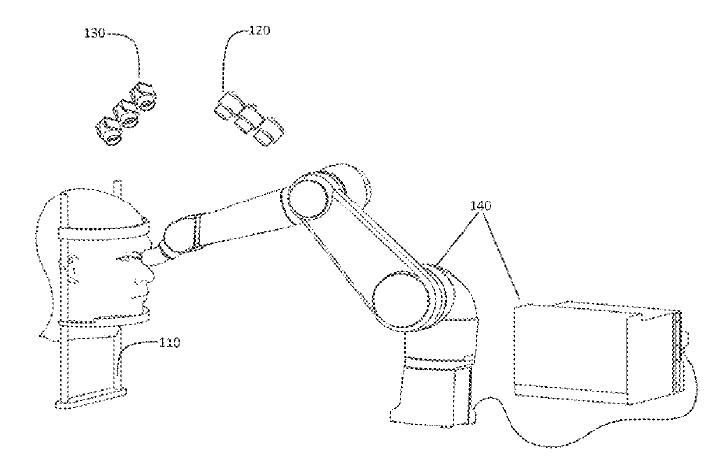
[202410] "Soft-bodied apparatus and method for opening eyelid"获美国专利授权
本发明提供了一种软体开眼睑装置及方法,包括:头部支撑模块、眼睑实时定位模块、机器人末端执行器实时定位模块、自动开眼睑操作模块。自动开眼睑操作模块包括机器人本体和机器人控制系统,机器人本体上设置有多轴刚体机械臂和软体末端执行器,机器人控制系统以用户上下眼睑的实时姿态为运动目标,以软体末端执行器的实时形状和姿态为反馈信息,控制机器人本体运动,实现眼睑的自动开睑。
[202410] "一种软体机器人仿真方法、装置、电子设备及存储介质"获发明专利授权
本发明提供一种软体机器人仿真方法、装置、电子设备及存储介质,该方法包括:确定第一时刻软体机器人物质点的第一运动学参数;通过插值函数确定物质点的第一运动学参数对应的第一网格动力学参数;基于第一网格动力学参数,通过隐式时间积分方法,确定第二时刻的第二网格动力学参数,第二时刻为第一时刻的下一时刻;通过插值函数确定第二网格动力学参数对应的物质点的第二运动学参数。该方案追踪软体机器人边界可以通过设置少量标记的物质点完成,无需PFEM中通过额外的算法解决不同运算步之间网格边界变化的问题,具有更高的灵活性。
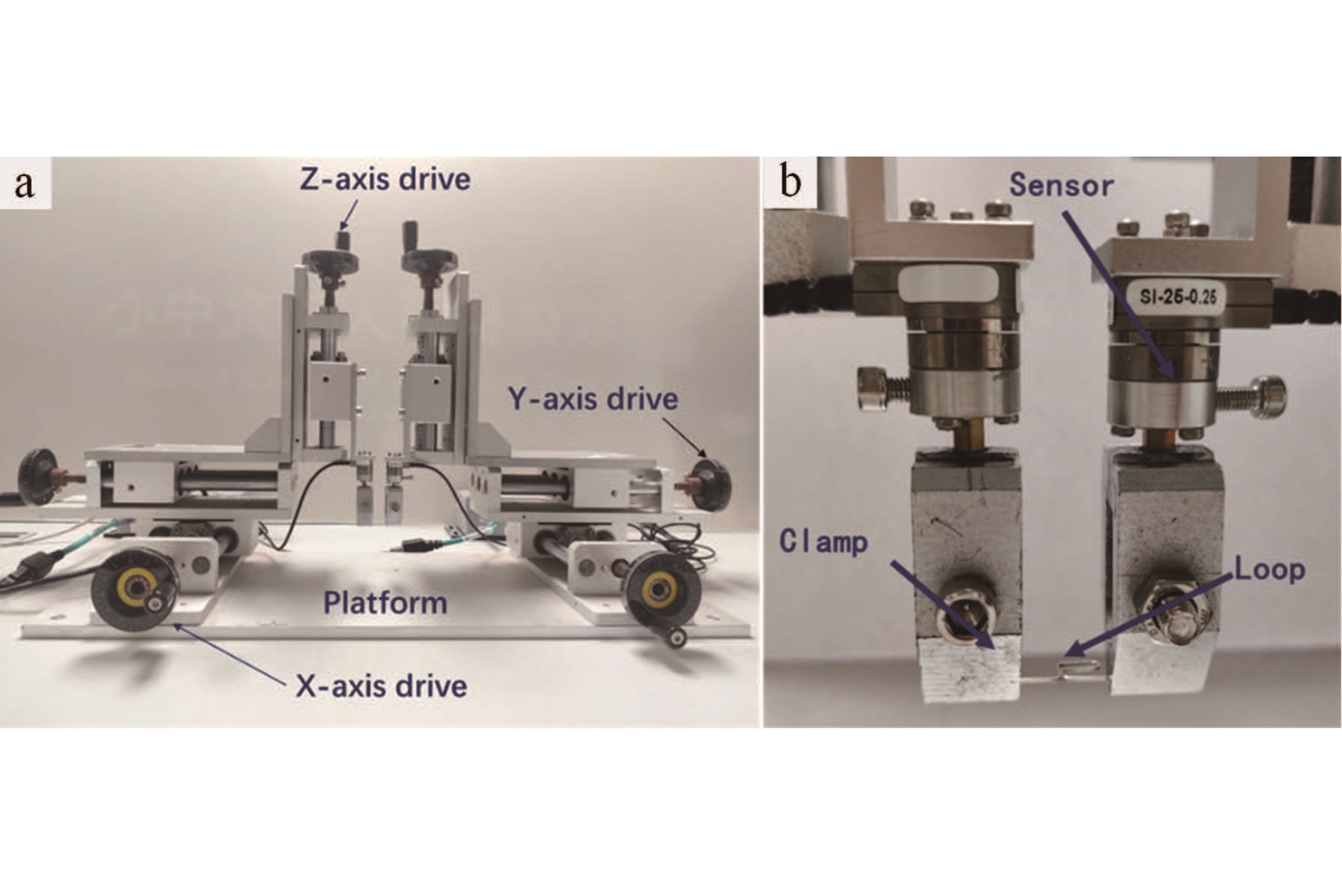
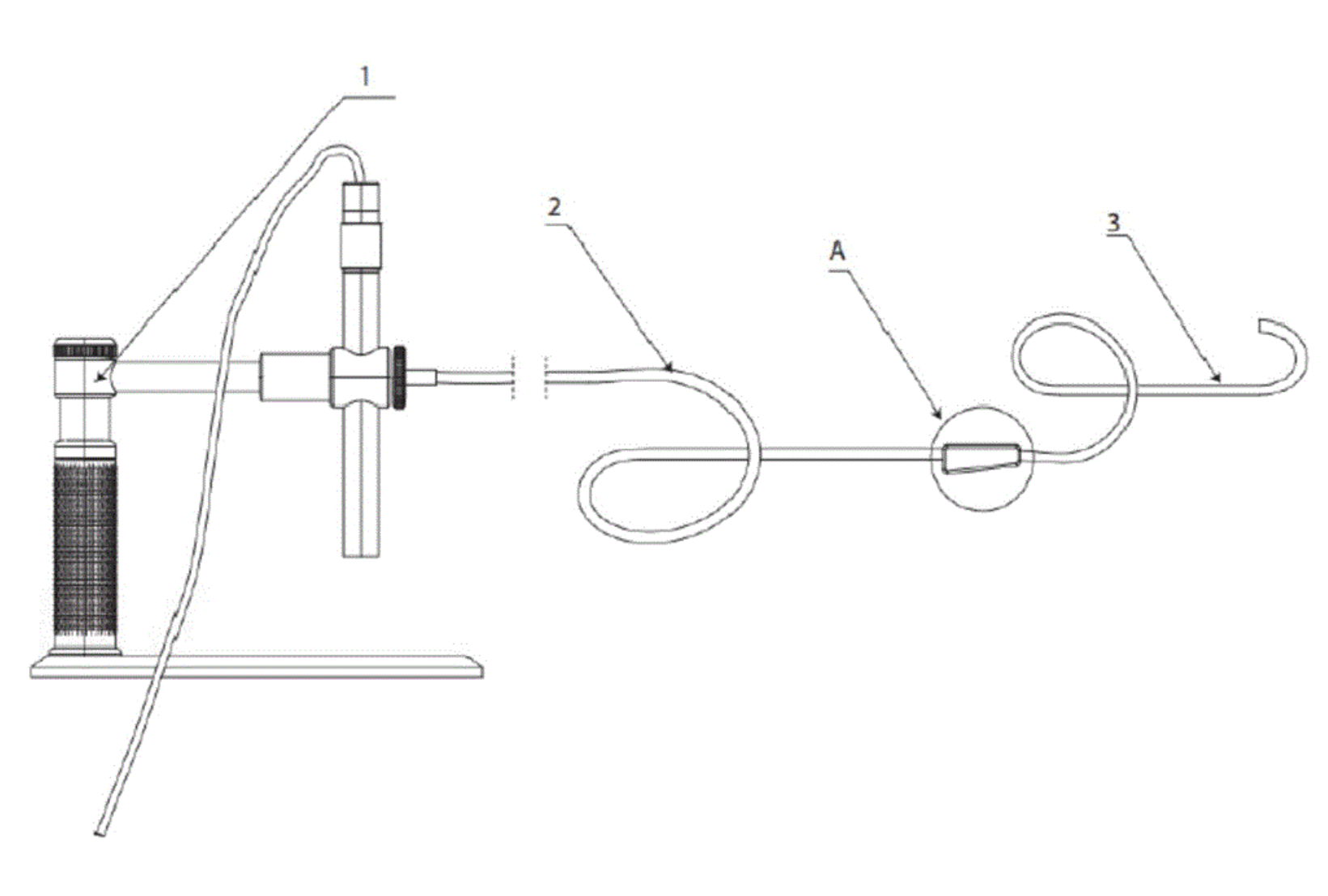
[202409] 论文Mechanical effect of different patterns for preparation of orthodontic appliances: An experimental study发表于Dental Materials Journal
弓丝弯曲是正畸治疗的关键,在手工和机器人自动弯曲过程中不可避免地需要多次弯曲。本文旨在定量评估不同制备方式的力学效应,比较一次弯曲和多次弯曲下正畸环的力学性能。采用三种典型的不锈钢正畸环(垂直环、T 环和 L 环),通过正畸力测试仪 (OFT) 对不同弯曲次数的环进行实验比较,量化制备模式的力学效应。对结果进行 t 检验。还进行了不锈钢弓丝的断裂试验,并记录了断裂时的弯曲次数。试验结果表明,一次和多次弯曲对正畸器械有显著的力学影响。多次弯曲会导致机械性能显著下降并可能损坏器械。
[202409] "一种用于宫腔诊疗的软体驱动器系统"获发明专利授权
本发明公开了一种用于宫腔诊疗的软体驱动器系统。该系统包括:软体驱动器本体和支撑部件,所述支撑部件用于支撑和固定所述软体驱动器本体,所述软体驱动器本体包含依次连接的软体非工作段、连接器和软体工作段,所述连接器用于连接软体非工作段、手术器械和软体工作段,所述软体驱动器本体被设置为采用流体或气体驱动方式控制其弯曲形变运动。本发明的系统具有无限自由度的灵活性和系统小型一体化的优势,提升了临床应用范围和效率。
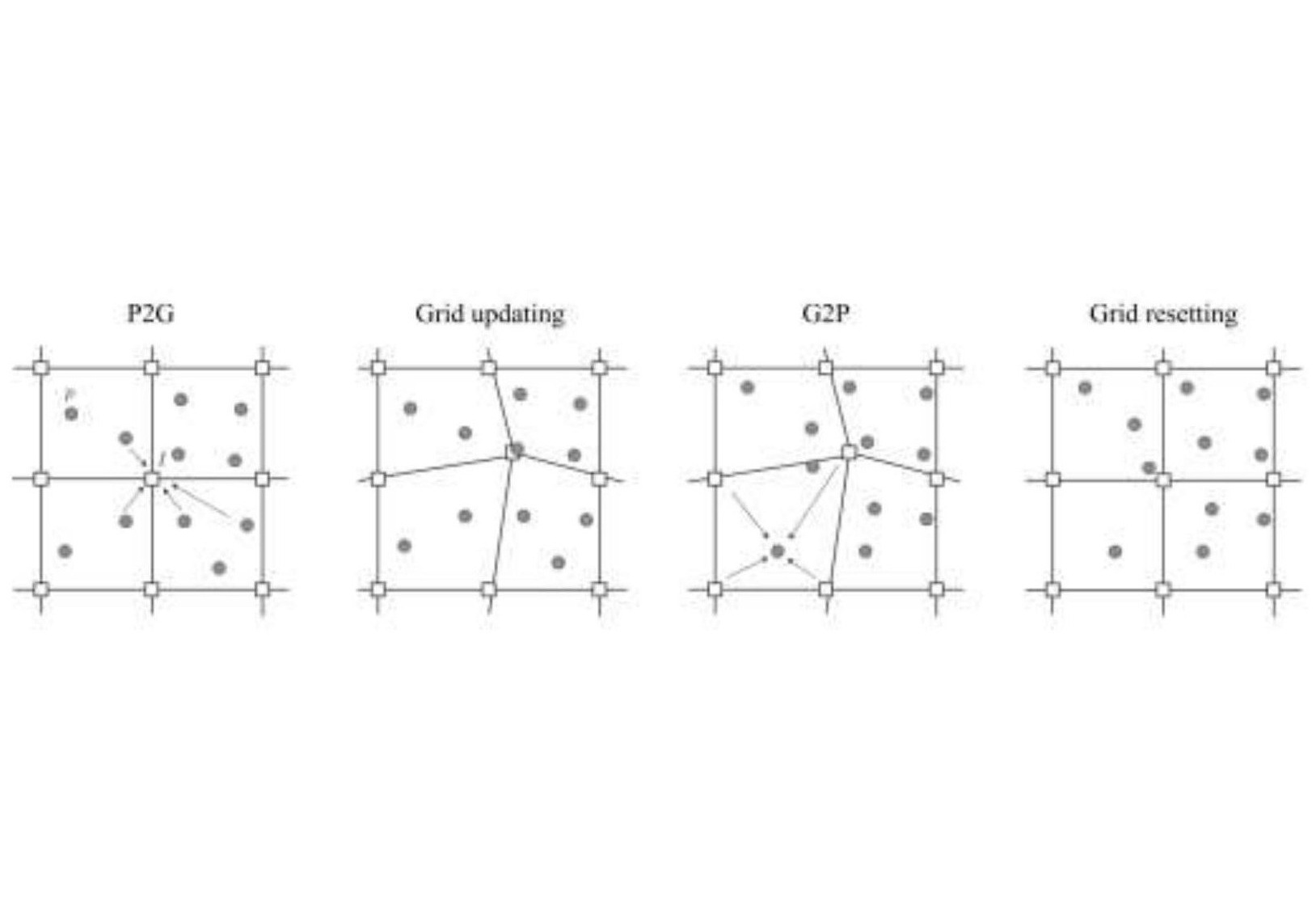
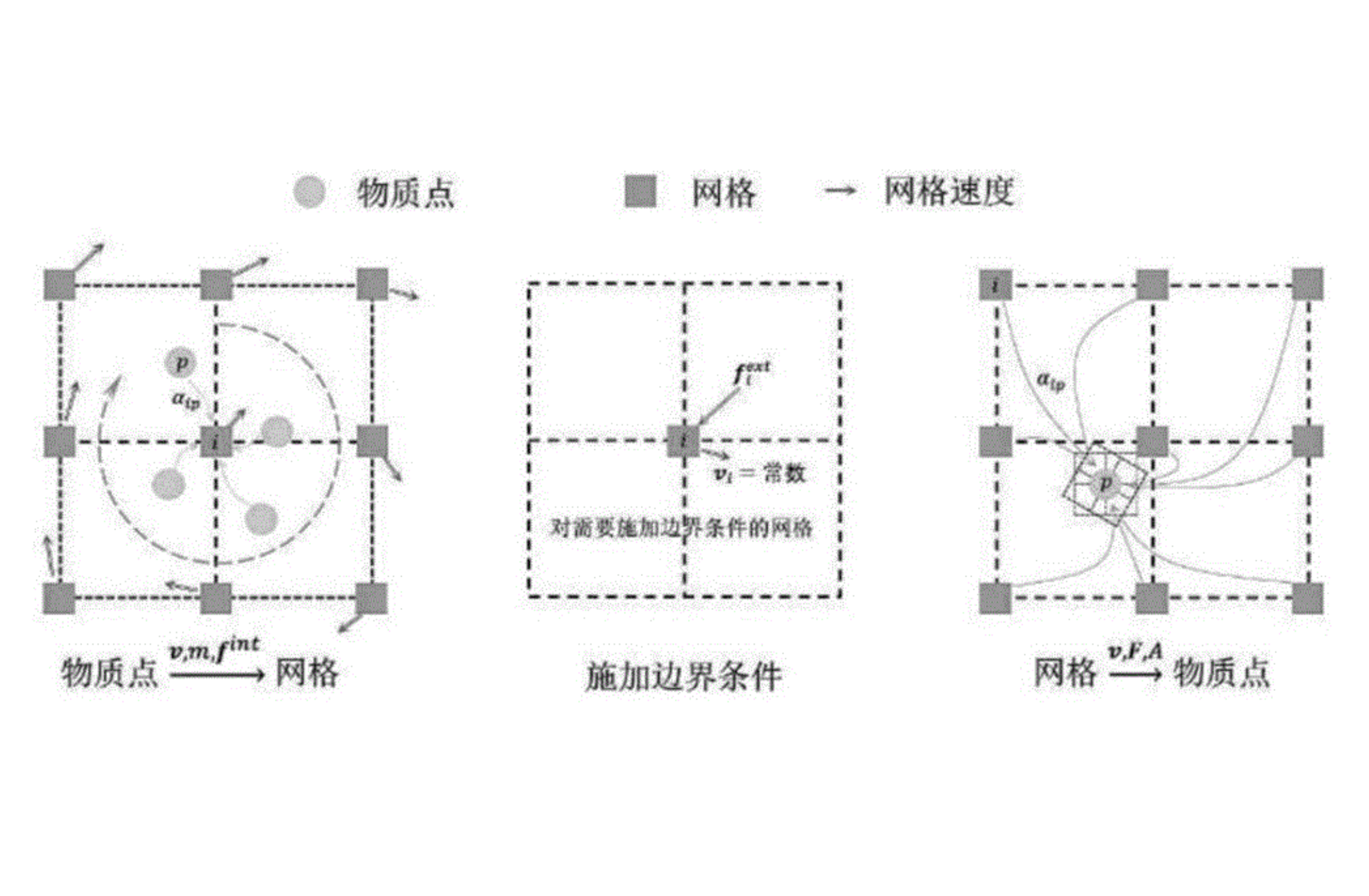
[202408] "一种基于物质点法的软体机器人仿真方法"获发明专利授权
本申请提供一种基于物质点法的软体机器人仿真方法,该方法包括:以空间网格为插值点更新粒子上的物理量;其中,在同一个仿真步内更新粒子上的物理量包括:物理量从粒子到空间网格的转移,物理量在空间网格上的更新,物理量从空间网格到粒子的转移;物理量在空间网格上的更新采用隐式时间积分。该方案可以在统一的更新框架内同时完成对不同物体的仿真,同时结合基于自动微分的物质点法隐式时间积分计算框架,保证了较高的精度。

[202408] 团队参加2024年中国机器人学术年会,受邀作《口腔诊疗机器人研究及应用进展》报告
夏泽洋教授团队参加2024年中国机器人学术年会,受邀作《口腔诊疗机器人研究及应用进展》报告。报告将机器人在口腔医学及临床诊疗各分支的研究及应用情况进行介绍,并对其关键技术及挑战进行分析。同时以报告人团队近年来在精准口腔正畸机器人领域的研究及应用进展为例,对上述关键技术进行场景化的阐述和分析。报告也对未来的研究及应用发展进行了探讨及展望。
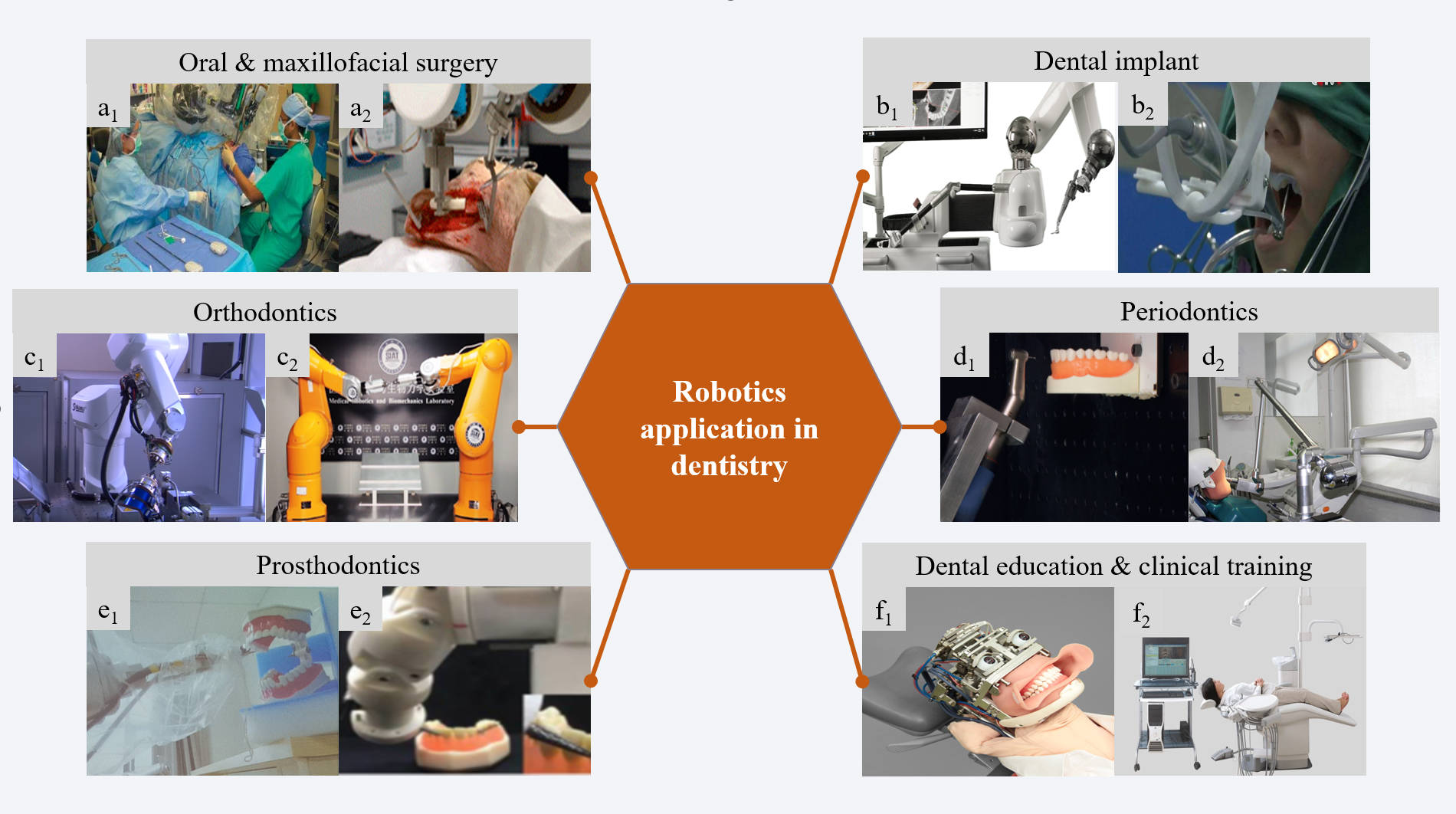
[202408] 综述论文Robotics Application in Dentistry: A Review发表于IEEE Transactions on Medical Robotics and Bionics
本文综述了数字牙科和智能牙科中机器人技术的应用和发展趋势。它探讨了牙科机器人在多个领域的应用,如口腔颌面外科、种植牙和正颌手术,强调了其通过高效、准确的技术集成改善患者治疗体验和结果。文章还讨论了人工智能在增强机器人决策能力方面的关键作用,以及机械设计和传感器技术在牙科机器人未来发展中的重要性。

[202407] 夏泽洋教授受邀参加《机器人》青年编委第一次工作会议并作《口腔诊疗机器人研究及应用进展》报告
夏泽洋教授参加《机器人》青年编委第一次工作会议并作《口腔诊疗机器人研究及应用进展》报告。报告将机器人在口腔医学及临床诊疗各分支的研究及应用情况进行了介绍,并对其关键技术及挑战进行分析。同时以报告人团队近年来在精准口腔正畸机器人领域的研究及应用进展为例,对上述关键技术进行场景化的阐述和分析。报告也对未来的研究及应用发展进行了探讨及展望。

[202405] 团队举行午餐会并进行了校史馆参观
2024年5月30日,团队举行了简约的餐聚活动,欢迎新加入团队的研究生。之后大家参观了校史馆,在教授的带领和讲解中,系统学习了交大校史。活动旨在增强了团队凝聚力,加强大家的荣誉感、责任感和使命感,取得了很好的效果。
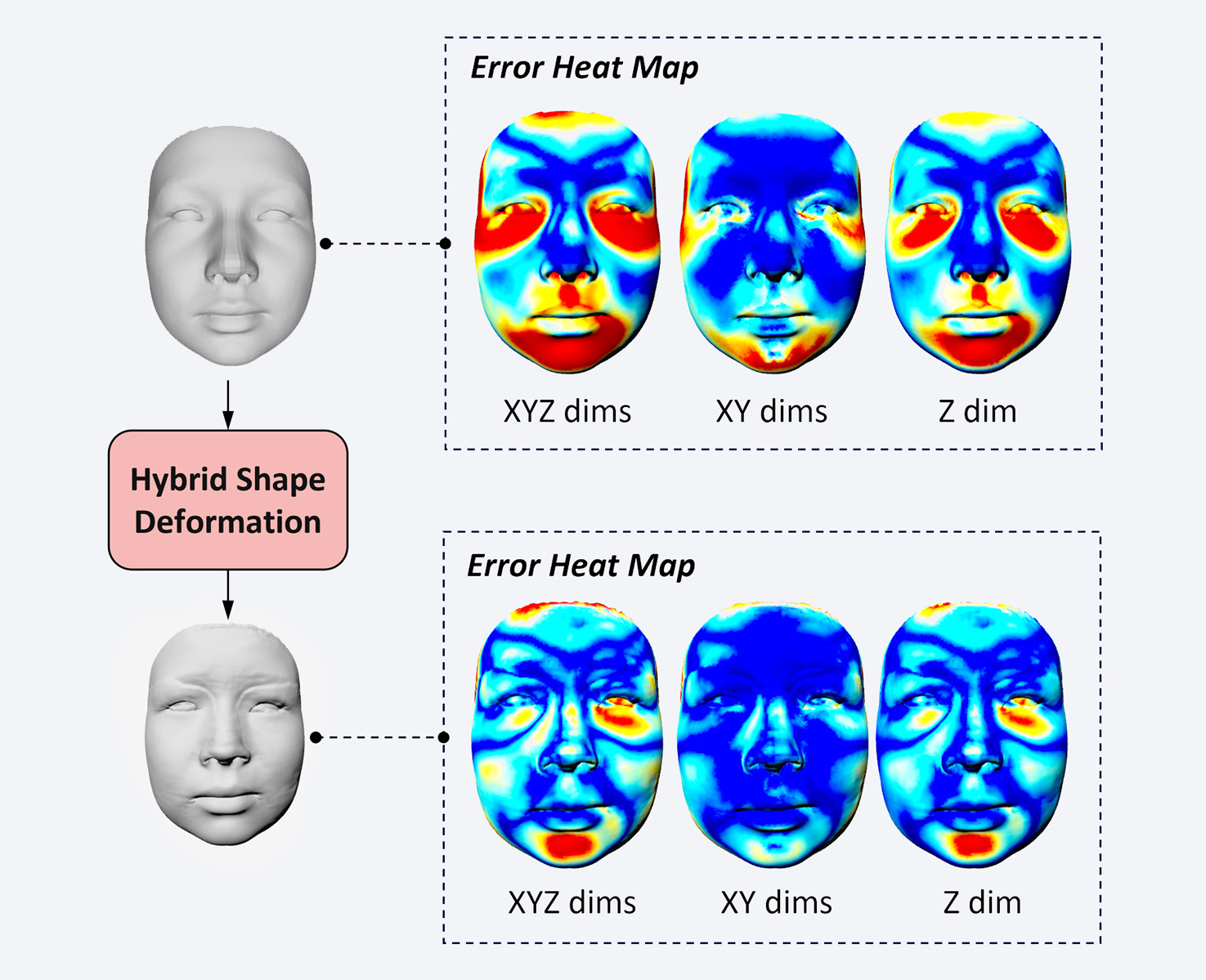
[202404] 合作研究论文Hybrid Shape Deformation for Face Reconstruction in Aesthetic Orthodontics发表于IEEE Transactions on Circuits and Systems for Video Technology
本文提出了一种新的方法,用于从单视角图像中精确重建具有几何细节的人脸模型,特别适用于正畸学。通过混合形状变形表示和多分支监督,解决了传统3D可塑模型在覆盖几何细节上的不足。本文使用正交分解将形状变形分解为正面平面位置偏移和深度偏移,采用网格变形和密集预测来显式和隐式地处理局部依赖关系。
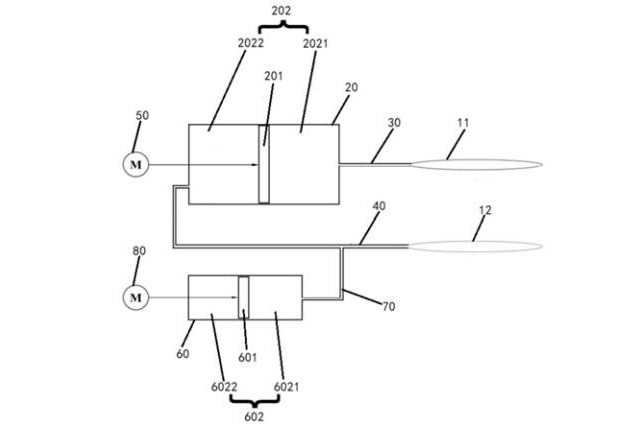
[202404] “一种用于心室功能辅助的软体驱动器及驱动方法“获发明专利授权
本发明旨在解决终末期心衰患者心脏功能衰退的问题。现有的软体心室功能辅助装置由于体积庞大和不适合临床应用,限制了其广泛使用。为了提高设备的便携性和临床适用性,发明人提出了一种用于心室功能辅助的软体驱动器及其驱动方法,旨在提供一种更为紧凑和高效的解决方案。

[202403] 夏泽洋教授应邀参加第43期“数字创新.设计前沿“砺远学术讲坛
3月30日,上海交通大学机械与动力工程学院第43期“数字创新.设计前沿“砺远学术讲坛在高田会堂成功举办”。夏泽洋教授应邀参加,介绍了所从事的生物力学驱动的医疗机器人学的机理、设计、控制方面的若干研究问题,以及相关理论及方法在精准口腔正畸诊疗机器人、软体心室功能辅助机器人、智能医疗操作机器人等应用方向上的进展。

[202208] 新书首发——夏泽洋教授团队新著《口腔医学图像处理》出版
近日,夏泽洋教授团队新著《口腔医学图像处理》由科学出版社正式出版,该书入选科学出版社信息科技学术专著丛书。《口腔医学图像处理》系统介绍了夏泽洋博士及其科研团队前期成果中基于临床口腔正畸治疗不同应用场景下各类口腔CT图像的组织分割与重构方法。

[202106] 新书首发——夏泽洋教授团队新著《现代机器人系统仿真》出版
近日,夏泽洋教授团队新著《现代机器人系统仿真》由华中科技大学出版社正式出版。该专著系统介绍了前期成果中“刚体—刚软混杂—软体”机器人系统的建模及仿真理论与方法,并入选了十三五国家重点图书出版规划项目。