一种在外部载荷作用下实现可形变对象操作的降阶建模方法
导读
随着机器人操作领域过去数十年内的快速发展,机器人操作研究和应用的对象由刚性对象拓展到可形变对象。与刚性对象相比,可形变对象的操作除空间6维位姿外,还包括本身复杂的形状变化,这给操作带来了更大的挑战。实现外部载荷作用下可形变对象的精确、快速建模对可形变对象机器人操控任务至关重要。然而,现有方法通常维度较高,导致其效率低下且难以有效整合外力。
为解决上述问题,本文提出了一种在外部载荷作用下实现可形变对象操作的降阶建模方法。该方法基于可形变对象精细网格中提取的控制柄构建降阶状态空间,建立控制柄与网格节点之间的仿射投影关系,并将外部载荷视为附加控制柄整合到降阶状态空间中,从而能构直观且准确地表征机器人操作下可形变对象的动力学特性。该方法在精度和效率方面均展现出卓越的性能,为可形变对象机器人操控任务提供一种新的建模方案。相关成果已发表在IEEE/ASME Transactions on Mechatronics期刊上,全文见https://doi.org/10.1109/TMECH.2025.3638619。
背景与问题
在可形变对象操控任务中,可形变对象展现出相当复杂的物理特性:其形状通常会在外部载荷的作用下发生改变。这种复杂的动态行为和高度灵活的特性给可形变对象的动力学和形变建模带来了巨大的挑战,从而阻碍了可形变对象建模在机器人操控任务中的应用。现有可形变对象建模方法可分为两类:基于物理的方法和基于视觉的方法。基于物理的方法能实现可形变对象的精确建模,但其通常具有高维状态,计算效率低,因此难以即时在操作任务中感知和估计可形变对象。而基于视觉的方法通常无法追踪可形变对象内部状态,并且难以表征和整合预设的外部载荷到可形变对象的动力学模型中。因此,如何在保证精度的前提下降低计算复杂度是当前可形变对象操控任务面临的主要挑战。
为降低模型复杂度,现有研究通常采用模型降阶方法,如本征正交分解(POD)和基于控制柄的降阶方法。这些方法用降阶模型代替全阶有限元模型以降低计算成本。然而,POD需要在离线阶段预先计算可形变对象的形变快照,会产生显著的离线计算成本和复杂度。虽然基于控制柄的降阶方法虽避免了形变快照预计算阶段,但现有方法通常将外部载荷视为独立的系统输入,其影响仅隐式地编码在形变快照或降阶基中,并且与降阶空间构建解耦。因此,它们无法在仿真过程中将动态外部载荷显式地集成到降阶状态空间中,这限制了其在可形变对象操作任务控制方面的有效性。
方法
为解决上述问题,本文提出了一种在外部载荷作用下实现可形变对象操作的降阶建模方法。首先,利用有限元方法建立可形变对象的精细网格,并从可形变对象精细网格中提取一组控制柄,构建一个低维降阶状态空间;然后,建立控制柄姿态到精细网格单元形变的仿射投影(图1);接着,将外部载荷视为附加控制柄整合到降阶状态空间中(图2);最后,采用时间积分法计算并求解运动系统中对象的形变状态(图3)。由此,建立了一个可形变对象降阶模型,从而能构直观、准确地表征机器人操作下可形变对象的动力学特性。
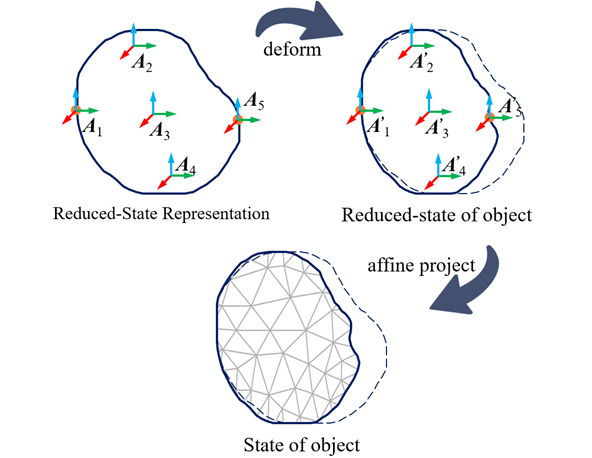
图1 降阶状态空间的构建
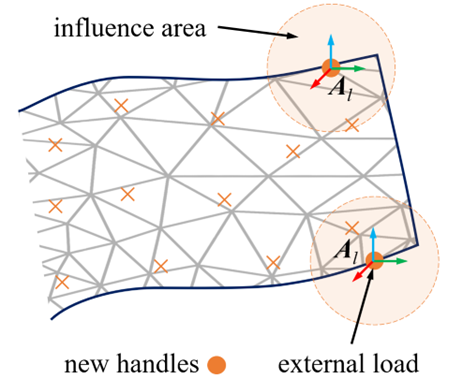
图2 将外部载荷纳入降阶状态空间的示意图
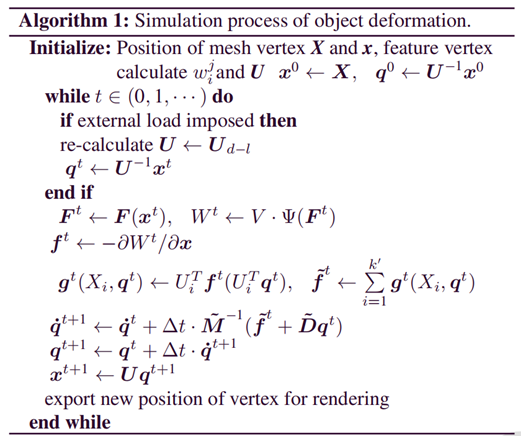
图3 外部载荷作用下对象形变计算算法流程
仿真及实验结果
为了评估所提出的方法,我们设计了不同类型的可形变物体,在不同类型的外部载荷作用下的仿真及sim2real实验。详细的数值评估(图4)和sim2real的实验(图5、图6)表明,与有限元模型相比,所提出方法的相对形变误差<10%,计算效率提高7-20倍,能够在降阶状态空间内准确预测外部载荷作用下可形变对象的形变。
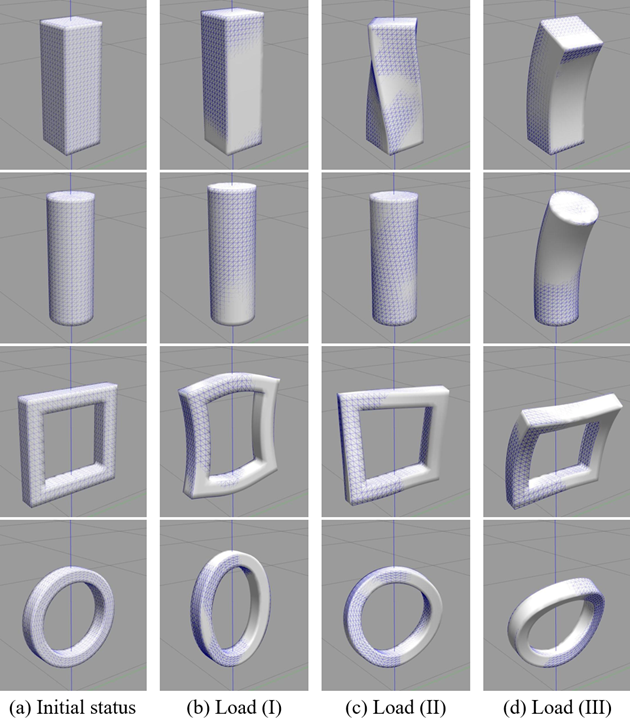
图4 不同外部载荷作用下可形变对象的仿真结果

图5 不同外部载荷作用下可形变对象的仿真结果
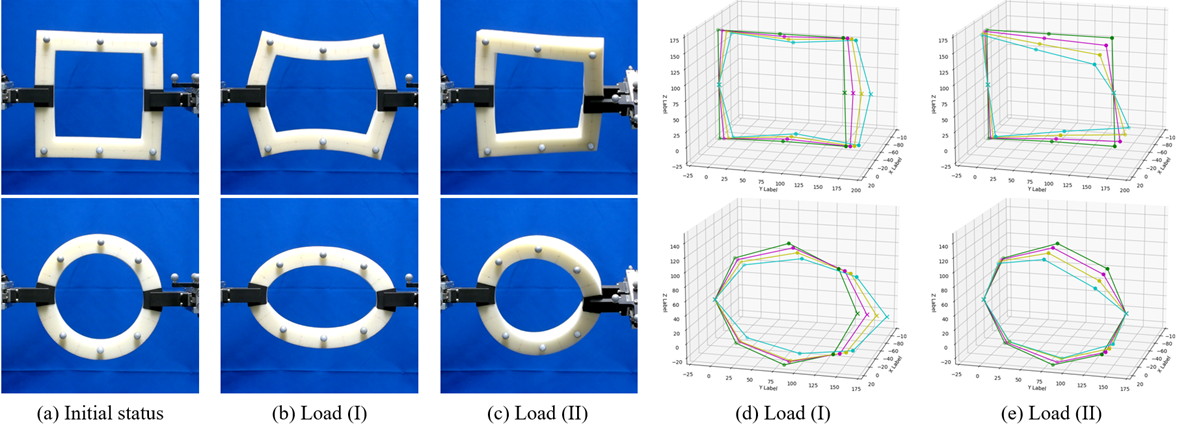
图6 不同外部载荷作用下可形变对象的实验结果
同时,为了展示所提出方法在医疗场景中的应用潜力,我们将该方法应用于超声引导下乳腺近距离放射治疗的机器人手术中(图7)。乳房在超声探头的压力下会发生形变,导致靶点移位,从而降低机器人手术的精度。构建可形变的乳房模型并进行机器人操作对于预测靶点移位和提高机器人手术精度至关重要。实验结果表明,仿真建模和实际场景之间的误差仅为1.28mm,所提出的方法能够准确预测超声引导下乳腺近距离放射治疗机器人手术过程中的形变位移。
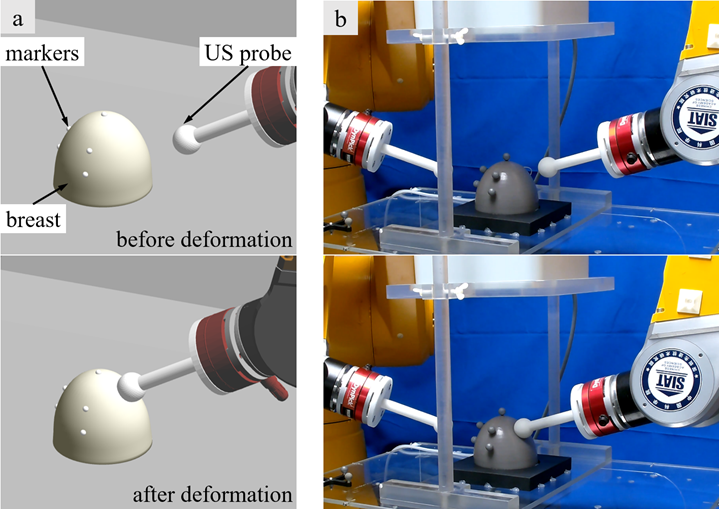
图7 手术机器人进行软组织操作示意图
总结与展望
本文提出了一种在外部载荷作用下实现可形变对象操作的降阶建模方法。仿真实验结果表明,所提出的方法能够在降阶状态空间中精确地表征对象的形变。为在外部载荷作用下的可形变对象机器人操作提供一种的解决思路,在医疗软组织操作领域具有广阔的应用前景。
吴清岳 供稿